
Technical Point of Contact: Mohamed Rabeek Sarbudeen
Email: msarbud@ncsu.edu
Address: Research Building II, North Carolina State University, 1009 Capability Dr, Raleigh, NC 27606
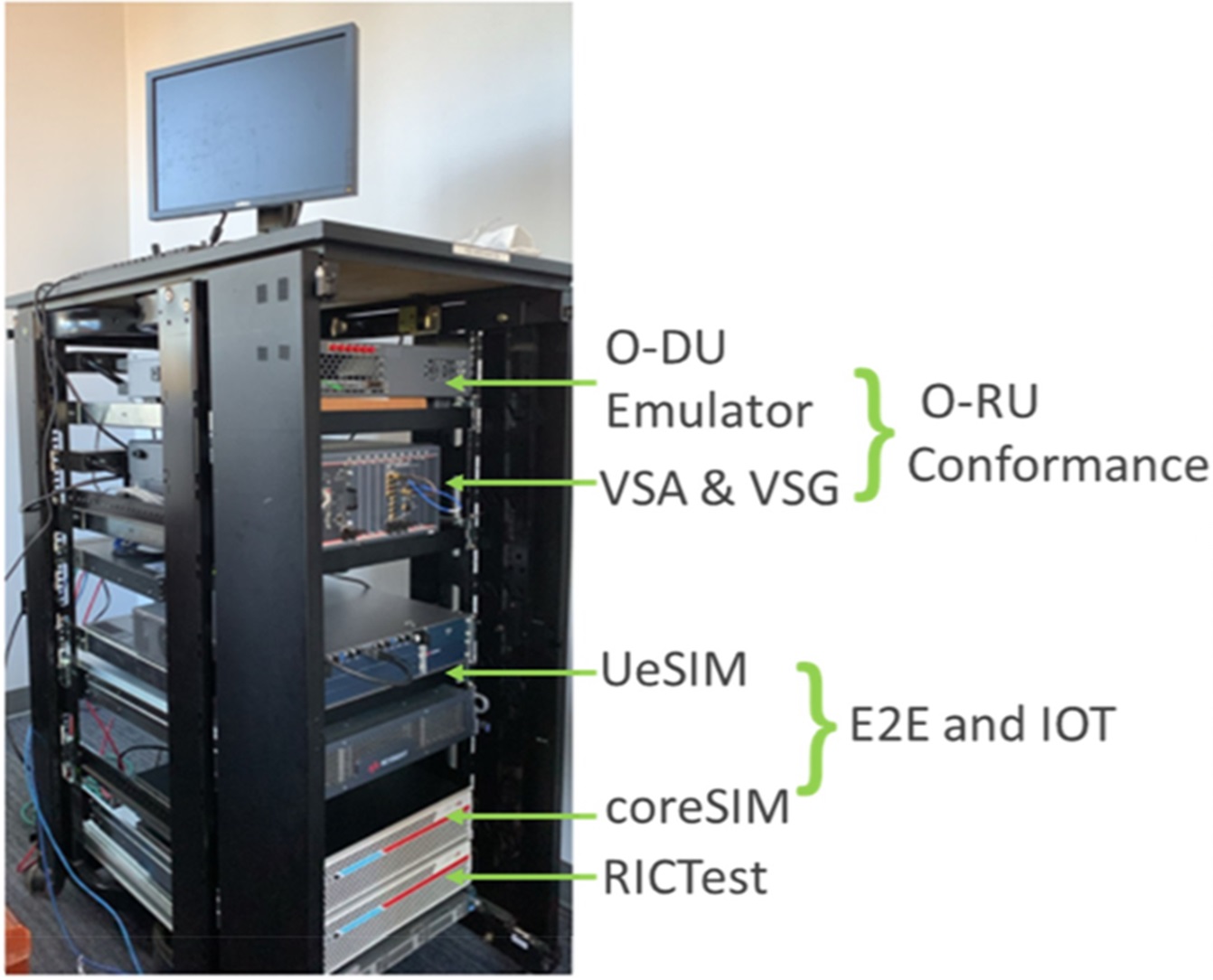
The AERPAW OTIC located in the Raleigh-Durham RTP Area is an O-RAN Alliance approved OTIC hosted by North Carolina State University. AERPAW OTIC currently has three test setups and the necessary equipment to test O-RAN DUTs and issue certificates and badges defined by the O-RAN Alliance.
- O-RAN Radio Unit (O-RU) conformance test setup
- End to End(E2E) and Interoperability(IOT) test setup
- RAN Intelligent Controller (RIC) test setup
AERPAW OTIC Equipment and Resources
- O-RAN Radio Unit (O-RU) conformance test setup
- Hardware
- Open RAN Studio Player and Capture Appliance
- Assembled PXIe / AXIe Transceiver Modular Solution Set
- Software
- PathWave Signal Generation for 5G NR, ORAN
- 5G NR modulation analysis
- Basic vector signal analysis and hardware connectivity
- O-RAN Radio Unit M-plane Automated toolset
- O-RAN Radio Unit S-plane Conducted Automated toolset
- O-RAN Radio Unit UC-plane FR1 Conducted TDD Base Automated toolset
- Hardware
- End to End(E2E) and Interoperability(IOT) test setup
- Hardware
- Ethernet Line Server Unit (eLSU) Mod. SL41 Opt. 1
- SDR v.4 Base Unit
- IXIA X100-5G Chassis (960-0529)
- IXIA 5G 25GE NIC for X100-5G (960-0528)
- Software
- 5GNR Starter Bundle 100 UE/cell 4 layers
- CoreSIM Lite in CSI
- Hardware
- RAN Intelligent Controller (RIC) test setup
- Hardware
- IXIA X100-5G Chassis (960-0529)
- IXIA 5G 25GE NIC for X100-5G (960-0528)
- Software
- NearRT RICTest and Non-RT RICTest
- RIC/SMO Simulator over E2/O1
- Hardware
In addition, O-RAN experimenters can have access to the AERPAW infrastructure and the outdoor drone test facility with a variety of other SDR-based and commercial equipment and software [1,2].
AERPAW OTIC Participation in O-RAN Alliance Plugfests
| Activity Overview and Participants | Technical Activity Focus | |
| Fall 2024 Plugfest | https://plugfestvirtualshowcase.o-ran.org/2024/Joint_North_America | O-RU Testing |
| Spring 2025 Plugfest | https://plugfestvirtualshowcase.o-ran.org/2025/Joint_North_America_O-RAN_PlugFest | O-RU Conformance Testing & End-to-End Testing |
| Fall 2025 Plugfest | In Progress | O-RU Conformance Testing & End-to-End Testing |

References
[1] R. Dutta, I. Guvenc, M. Sichitiu, O. Ozdemir, and M. Mushi, “AERPAW: A National Facility for Wireless and Drone Research“, IEEE ComSoc Technology News, June 2023.
[2] AERPAW User Manual: https://sites.google.com/ncsu.edu/aerpaw-user-manual/