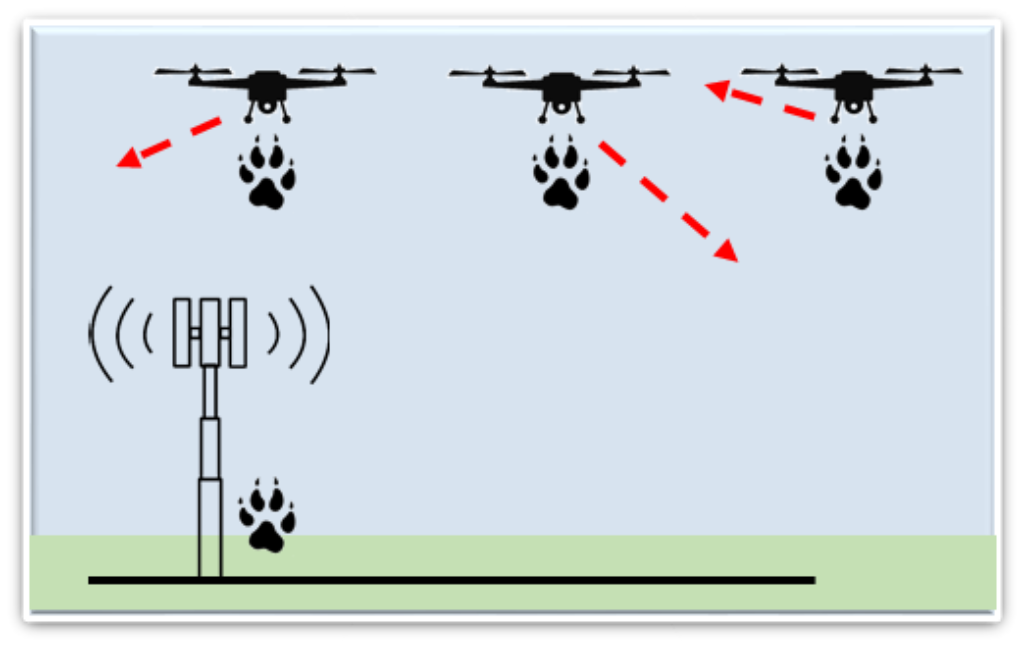
In this experimentation option, there will be multiple drones that are in the coverage area of the same fixed node. Drones may be stationary, or they may be moving with a certain pattern in the coverage of the fixed node. Multiple drone safety pilots are required before a Part 107 exemption is secured for a single pilot to control multiple drones. This is illustrated with the help of an example scenario in the adjacent figure. Depending on the experiment duration and type, drone tethers can be utilized. Avoiding the collision between multiple drones is a critical performance goal for this setup.
Experiments in this scenario will include but not limited to 1) Resource allocation and scheduling for drone (and ground) users; 2) Resource allocation with an interfering drone node; 3) Resource and scheduling implications of C-V2X Mode 3 (drones communicated through BS) vs. Mode 4 (drones communicate directly) with srsLTE; 4) Multiple drones with no ground BS, forming an ad-hoc/swarm network, 5) Considering multiple drones: resource allocation, interference, and network load/offload. Multiple drones can also facilitate an interesting experiment on testing the connectivity/reliability of the multi-hop UAVto-UAV links. Moreover, due to the lack of fixed and stable infrastructure and various environmental issues, such as bad weather conditions, the deployed UAVs may face random wobbling or fluctuations while hovering over fixed locations. This phenomenon, in turn, can impact the quality of the related links significantly, especially, when multiple UAVs are involved. Though the impacts of the UAV fluctuations are studied in the literature, real-world experiments can provide more insights.
Resource Allocation with Drone Presence
[1] M. M. Azari, G. Geraci, A. Garcia-Rodriguez, and S. Pollin, “UAV-to-UAV communications in cellular networks,” IEEE Trans. Wireless Commun., vol. 19, no. 9, pp. 6130–6144, 2020.
[2] H. Zhao, H. Wang, W. Wu, and J. Wei, “Deployment algorithms for UAV airborne networks toward on-demand coverage,” IEEE J. Sel. Areas Commun., vol. 36, no. 9, pp. 2015–2031, 2018.
[3] M. Polese, L. Bertizzolo, L. Bonati, A. Gosain, and T. Melodia, “An experimental mmwave channel model for UAV-to-UAV communications,” in Proc. ACM Workshop on Millimeter-Wave Networks and Sensing Systems, ser. mmNets’20. New York, NY, USA: Association for Computing Machinery, 2020. [Online].Available: https://doi.org/10.1145/3412060.3418431
[4] Y. Kawamoto, H. Nishiyama, N. Kato, F. Ono, and R. Miura, “Toward future unmanned aerial vehicle networks: Architecture, resource allocation, and field experiments,” IEEE Wireless Commun., vol. 26, no. 1, pp. 94–99, 2019.
[5] H. Nishiyama, Y. Kawamoto, and D. Takaishi, “On OFDM-based resource allocation in LTE radio management system for unmanned aerial vehicles (UAVs),” in Proc. IEEE Veh. Technol. Conf., 2017, pp. 1–5.
[6] M. Liu, J. Yang, and G. Gui, “DSF-NOMA: UAVassisted emergency communication technology in a heterogeneous internet of things,” IEEE Internet Things J., vol. 6, no. 3, pp. 5508–5519, 2019.
[7] Y. Li, H. Zhang, K. Long, S. Choi, and A. Nallanathan, “Resource allocation for optimizing energy efficiency in NOMA-based fog UAV wireless networks,” IEEE Network, vol. 34, no. 2, pp. 158–163, 2020.
[8] Z. Na, Y. Liu, J. Shi, C. Liu, and Z. Gao, “UAVsupported Clustered NOMA for 6G-enabled internet of things: Trajectory planning and resource allocation,” IEEE Internet Things J., pp. 1–1, 2020.
Drone Ad-hoc Network
[1] K. Kumar, S. Kumar, O. Kaiwartya, P. K. Kashyap, J. Lloret, and H. Song, “Drone assisted flying adhoc networks: Mobility and service-oriented modeling using neuro-fuzzy,” Ad Hoc Networks, vol. 106, p. 102242, 2020.
[2] O. Bouachir, A. Abrassart, F. Garcia, and N. Larrieu, “A mobility model for UAV ad hoc network,” in Int. Conf. on Unmanned Aircraft Systems (ICUAS), 2014, pp. 383–388.
[3] A. Gholami, N. Torkzaban, J. S. Baras, and C. Papagianni, “Joint Mobility-Aware UAV Placement and Routing in Multi-Hop UAV Relaying Systems,” arXiv e-prints, p. arXiv:2009.14446, Sep. 2020.
[4] K. Heimann, J. Tiemann, S. Boecker, and C. Wietfeld, “On the potential of 5G mmWave pencil beam antennas for UAV communications: An experimental evaluation,” in Proc. Int. ITG Workshop on Smart Antennas, 2018, pp. 1–6.
Impact of Drone Wobling
[1] M. Banagar, H. S. Dhillon, and A. F. Molisch, “Impact of UAV Wobbling on the Air-to-Ground Wireless Channel,” arXiv e-prints, p. arXiv:2004.02771, Apr. 2020.
[2] M. T. Dabiri, H. Safi, S. Parsaeefard, and W. Saad, “Analytical channel models for millimeter-wave UAV networks under hovering fluctuations,” IEEE Trans. Wireless Commun., vol. 19, no. 4, pp. 2868–2883, 2020.
[3] D. Xu, Y. Sun, D. W. K. Ng, and R. Schober, “Robust resource allocation for UAV systems with UAV jittering and user location uncertainty,” in Proc. IEEE Globecom Workshops (GC Wkshps), 2018, pp. 1–6.