
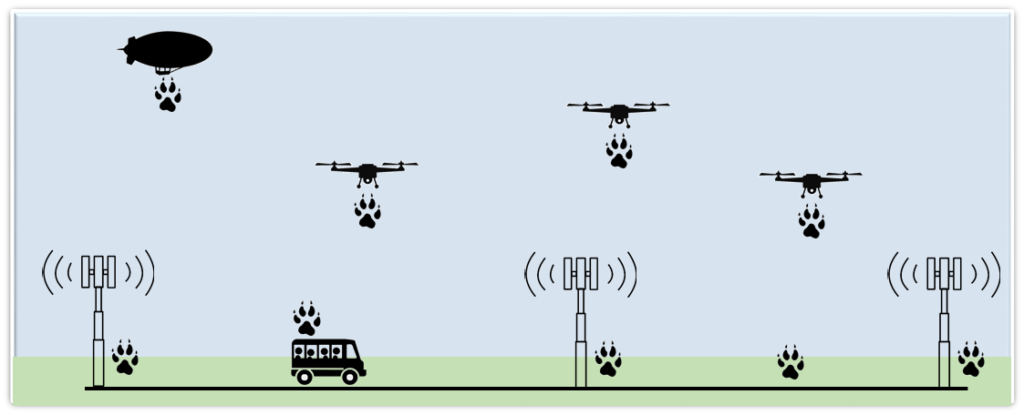
By combining the scenarios in earlier sections, larger-scale and more complex experiments are possible, as illustrated in the adjacent figure, with multiple fixed and mobile nodes. This option requires more testbed resources in the form of UAS pilots, fixed/portable nodes, and spectrum utilization.
As example experiments, one can measure rural connectivity with multi-hop links and long-distance millimeter-wave links. The presence of high altitude platforms (HAPs) at 20 km to 50 km above the ground is considered in the existing literature. While experiments with HAPs may be very challenging in a platform such as AERPAW, the use of helikite aerostat platforms can allow flying UAS at higher altitudes, for longer durations, with larger payloads. Such experiments can consider the coexistence of links from an aerostat platform with terrestrial systems using intelligent techniques to dynamically manage radio resources and mitigate interference.
Some critical aspects of this setup will be considering multiple drones to compare C-V2X Mode 3 (drones communicated through BS) vs. Mode 4 (drones communicate directly) using srsLTE, resource allocation in C-V2X in presence of multiple drones and BSs, testing drone-based multi-hop relay network, among others. At the last stage of the setup, this experimental scenario can test fully operational miniature UAS deployments where UAVs can act as both relays and aerial users.
Multi-hop Rural Connectivity Testing
| [1] Y. Takahashi, Y. Owada, H. Okada, and K. Mase, “A wireless mesh network testbed in rural mountain areas,” ser. WinTECH ’07. New York, NY, USA: Association for Computing Machinery, 2007, p. 91–92. [Online]. Available: https://doi.org/10.1145/1287767.1287785 |
| [2] L. Bertizzolo, T. X. Tran, B. Amento, B. Balasubramanian, R. Jana, H. Purdy, Y. Zhou, and T. Melodia, “Live and let live: Flying UAVs without affecting terrestrial UEs,” in Proc. Int. Workshop on Mobile Computing Syst. Appl. (HotMobile). New York, NY: Association for Computing Machinery, 2020, p. 21–26. [Online]. Available: https://doi.org/10.1145/3376897.3377860 |
Rural Connectivity with mmWave Links
| [1] W. Khawaja, O. Ozdemir, and I. Guvenc, “UAV air-to-ground channel characterization for mmWave systems,” in Proc. IEEE Vehic. Technol. Conf. (VTC), 2017, pp. 1–5. |
| [2] M. Iwabuchi, A. Benjebbour, Y. Kishiyama, G. Ren, C. Tang, T. Tian, L. Gu, Y. Cui, and T. Takada, “Outdoor experiments on long-range and mobile communications using 39- GHz band for 5G and beyond,” IEICE Trans. Commun., vol. advpub, 2019. |
| [3] G. R. MacCartney, S. Sun, T. S. Rappaport, Y. Xing, H. Yan, J. Koka, R. Wang, and D. Yu, “Millimeter-wave wireless communications: New results for rural connectivity,” in Proc. Workshop on All Things Cellular: Operations, Applications, and Challenges. New York, NY, USA: Association for Computing Machinery, 2016, p. 31–36. [Online]. Available: https://doi.org/10.1145/2980055.2987353 |
| [4] S. Garcia Sanchez, S. Mohanti, D. Jaisinghani, and K. R. Chowdhury, “Millimeter-wave base stations in the sky: An experimental study of UAV-to-ground communications,” IEEE Trans. Mobile Comput., pp. 1–1, 2020. |
Experiments with HAP
| [1] L. Nagpal and K. Samdani, “Project loon: Innovating the connectivity worldwide,” in 2017 2nd IEEE Int. Conf. on Recent Trends in Electronics, Information Communication Technology (RTEICT), 2017, pp. 1778–1784. |
| [2] “Google Project Loon.” [Online]. Available: https://loon.co/ |
| [3] A. Nauman and M. Maqsood, “System design and performance evaluation of high altitude platform: Link budget and power budget,” in Int. Conf. on Advanced Communication Technology (ICACT), 2017, pp. 138–142. |
Resource Allocation with Different C-V2X Nodes
| [1] Y. Jeon and H. Kim, “An explicit reservation augmented resource allocation scheme for C-V2X sidelink mode 4,” IEEE Access, vol. 8, pp. 147 241–147 255, 2020. |
| [2] D. Wang, R. R. Sattiraju, A. Weinand, and H. D. Schotten, “System-level simulator of LTE sidelink CV2X communication for 5G,” in Proc. ITG Symp. Mobile Communication – Technologies and Applications, 2019, pp. 1–5. |
| [3] A. Nabil, K. Kaur, C. Dietrich, and V. Marojevic, “Performance analysis of sensing-based semi-persistent scheduling in C-V2X networks,” in Proc. IEEE Veh. Technol. Conf. (VTC), 2018, pp. 1–5. |
| [4] R. Molina-Masegosa, J. Gozalvez, and M. Sepulcre, “Configuration of the C-V2X mode 4 sidelink PC5 interface for vehicular communication,” in Int. Conf. on Mobile Ad-Hoc and Sensor Networks (MSN), 2018, pp. 43–48. |
| [5] C. Campolo, A. Molinaro, F. Romeo, A. Bazzi, and A. O. Berthet, “Full duplex-aided sensing and scheduling in cellular-V2X mode 4,” ser. TOPCars ’19. New York, NY, USA: Association for Computing Machinery, 2019, p. 19–24. [Online]. Available: https://doi.org/10.1145/3331054.3331549 |
| [6] R. Molina-Masegosa and J. Gozalvez, “LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to everything communications,” IEEE Veh. Technol. Mag., vol. 12, no. 4, pp. 30–39, 2017. |
| [7] B. Sliwa, M. Patchou, K. Heimann, and C. Wietfeld, “Simulating Hybrid Aerial- and Ground-based Vehicular Networks with ns-3 and LIMoSim,” arXiv e-prints, p. arXiv:2003.09829, Mar. 2020. |
| [8] S. Mignardi, C. Buratti, A. Bazzi, and R. Verdone, “Trajectories and resource management of flying base stations for C-V2X,” Sensors (Basel, Switzerland), vol. 19, 2019. |