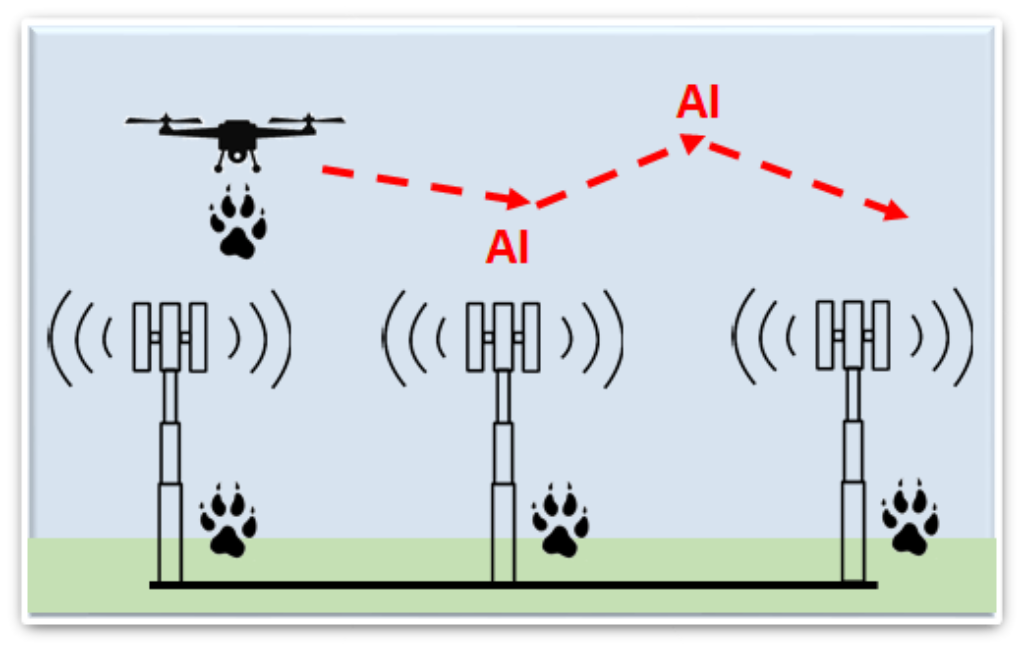
This experimental setup will be an extension of the previous two scenarios, i.e., a drone moves through the coverage area of several fixed nodes, either through pre-defined waypoints or through autonomous navigation, as shown in the adjacent figure. The towers may be within the same site or different AERPAW sites, e.g., one fixed node each in LWL, Town of Cary, and Centennial Campus, which may have sufficient coverage for high drone altitudes for long-range IoT links.
In this experiment mode, the example experiments may include: 1) Handover optimization for drones by semi-statically or dynamically changing handover parameters; 2) Triangulation and tracking of the drone at the base stations; 3) LTE cell association based on RSRP/RSRQ; 4) Interference characterization to other terrestrial cells/users; 5) Evaluating different frequency reuse patterns; 6) Observe the behavior of the drone with fake BS(s). Experimental insights from Scenario 3 and Scenario 6 will play a critical role especially in characterizing the drone handover/mobility and cell association process. This experimental setup could be a forerunner of a fully operational autonomous drone setup, where a UAV can move autonomously while maintaining connectivity to a certain network service provider.
Handover Measurement
[1] M. Moin Uddin Chowdhury, W. Saad, and I. Guvenc, “Mobility Management for Cellular-Connected UAVs: A Learning-Based Approach,” arXiv e-prints, p. arXiv:2002.01546, Feb. 2020.
[2] Y. Chen, X. Lin, T. Khan, and M. Mozaffari, “Efficient drone mobility support using reinforcement learning,” in Proc. IEEE Wireless Commun. Netw. Conf. (WCNC), 2020, pp. 1–6.
[3] M. Mahdi Azari, A. Hajijamali Arani, and F. Rosas, “Mobile Cellular-Connected UAVs: Reinforcement Learning for Sky Limits,” arXiv e-prints, p. arXiv:2009.09815, Sep. 2020.
[4] V. M. Nguyen, C. S. Chen, and L. Thomas, “Handover measurement in mobile cellular networks: Analysis and applications to LTE,” in Proc. IEEE Int. Conf. Commun. (ICC), Kyoto, Japan, June 2011, pp. 1–6.
[5] H. C. Nguyen, R. Amorim, J. Wigard, I. Z. Kovacs, and P. Mogensen, “Using LTE networks for UAV command and control link: A rural-area coverage analysis,” in Proc. IEEE Veh. Technol. Conf. (VTC), 2017, pp. 1–6.
Cell Association Experiment
[1] 3GPP, “Enhanced LTE support for aerial vehicles,” Technical Specification (TS) 36.777, 2018. [Online]. Available: https://portal.3gpp.org/desktopmodules/Specifications/ SpecificationDetails.aspx?specificationId=3231
[2] I. Kovacs, R. Amorim, H. C. Nguyen, J. Wigard, and P. Mogensen, “Interference analysis for UAV connectivity over LTE using aerial radio measurements,” in Proc. IEEE Veh. Technol. Conf. (VTC), 2017, pp. 1–6.
[3] V. Platzgummer, V. Raida, G. Krainz, P. Svoboda, M. Lerch, and M. Rupp, “UAV-based coverage measurement method for 5G,” in Proc. IEEE Veh. Technol. Conf., 2019, pp. 1–6.
[1] W. Mei, Q. Wu, and R. Zhang, “Cellular-connected UAV: Uplink association, power control, and interference coordination,” IEEE Trans. Wireless Commun., vol. 18, no. 11, pp. 5380–5393, 2019.
[2] U. Challita, W. Saad, and C. Bettstetter, “Interference management for cellular-connected UAVs: A deep reinforcement learning approach,” IEEE Trans. Wireless. Commun., vol. 18, no. 4, pp. 2125–2140, Apr. 2019.
[3] L. Liu, S. Zhang, and R. Zhang, “CoMP in the sky: UAV placement and movement optimization for multiuser communications,” IEEE Trans.Commun., vol. 67, no. 8, pp. 5645–5658, 2019.
Fake BS Detection
[1] Z. Zhuang, X. Ji, T. Zhang, J. Zhang, W. Xu, Z. Li, and Y. Liu, “FBSleuth: fake base station forensics via radio frequency fingerprinting,” ser. ASIACCS ’18. New York, NY, USA: Association for Computing Machinery, 2018, p. 261–272. [Online]. Available: https://doi.org/10.1145/3196494.3196521
[2] K. Huang and H. Wang, “Identifying the fake base station: A location-based approach,” IEEE Commun. Lett., vol. 22, no. 8, pp. 1604–1607, 2018.
[3] M. Labib, V. Marojevic, and J. H. Reed, “Analyzing and enhancing the resilience of LTE/LTE-A systems to RF spoofing,” in Proc. IEEE Conf. Standards Commun. Netw. (CSCN), 2015, pp. 315–320.
[4] N. Tandiya, A. Jauhar, V. Marojevic, and J. H. Reed, “Deep predictive coding neural network for RF anomaly detection in wireless networks,” in Proc. IEEE Int. Conf. Commun. Workshops (ICC Workshops), 2018, pp. 1–6.
[5] A. S. Abdalla, K. Powell, V. Marojevic, and G. Geraci, “UAV-assisted attack prevention, detection, and recovery of 5G networks,” IEEE Wireless Commun., vol. 27, no. 4, pp. 40–47, 2020.
Tracking of the Drone at BS
[1] J. Chen, D. Raye, W. Khawaja, P. Sinha, and I. Guvenc, “Impact of 3D UWB antenna radiation pattern on air-to-ground drone connectivity,,” in Proc. IEEE Veh. Technol. Conf. (VTC)., Chicago, IL, Sep 2018.
[2] P. Sinha, Y. Yapici, and I. Guvenc, “Impact of 3D antenna radiation patterns on TDOA-based wireless localization of UAVs,” in Proc. IEEE Int. Conf. Computer Commun. (INFOCOM) Workshops, 2019, pp. 614–619.