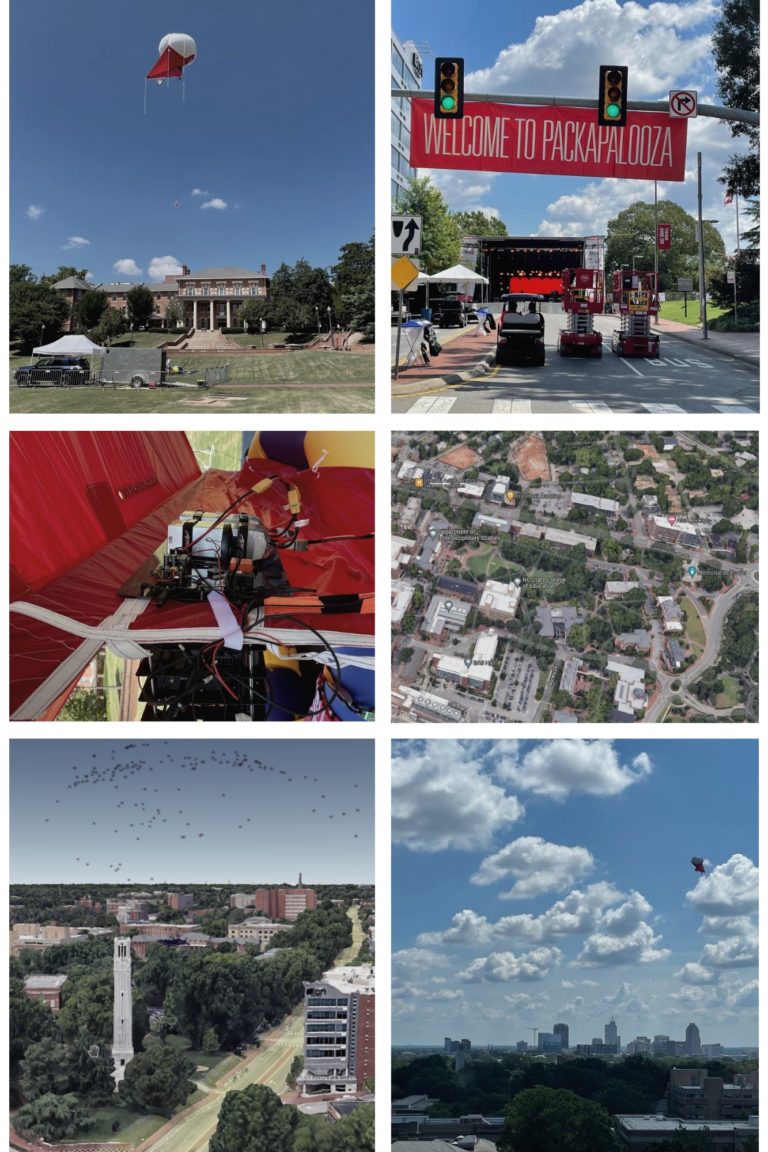
AERPAW team worked on the manual PID tuning process of the large AERPAW UAV (the “Fat Bird”). The manual control was tightened for better responsiveness as well as reducing the limits on the maximum roll and pitch as the default was too aggressive for a drone of this size. Subsequently, the team took it out for a spin to get a feel of the result and it was deemed as flying well. The UAV breached the geofence in the end, and initiated (and completed) a return to launch, landing where it took off from.
Ground Control and Portable Node Prototype
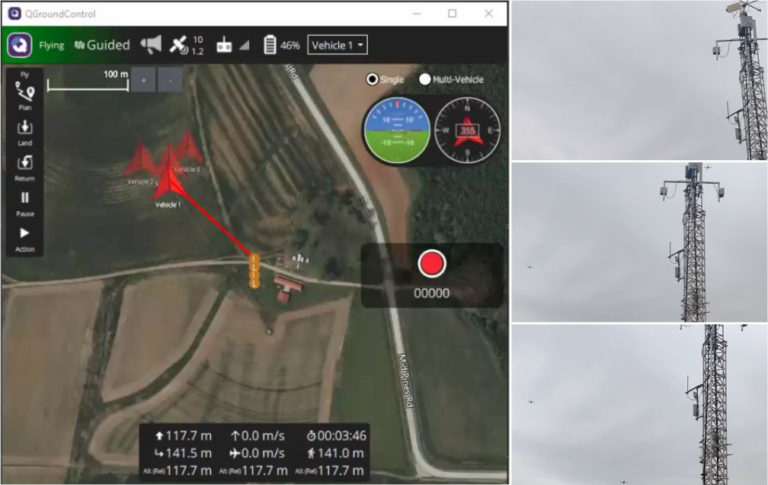
The below figures show our current ground base station set up with a table that includes two laptops (one for setting and monitoring the UAV, the other for controlling and monitoring the companion computer). Internet access is currently available as one of the two laptops has a cellular modem and creates a WiFi hotspot. Sun glare is a perennial problem.
The portable node prototype was manually put together after a packaging design process. RF testing of all the components has been carried out (experimental SDR, monitoring SDR, backhaul cellular modem).



AERPAW Presentations
AERPAW team recently carried out the following presentations:
M. U. Uddin Chowdhury, C. K. Anjinappa, I. Guvenc, M. L. Sichitiu, O. Ozdemir, U. Bhattacherjee, R. Dutta, V. Marojevic, and B. Floyd, “A Taxonomy and Survey on Experimentation Scenarios for Aerial Advanced Wireless Testbed Platforms”, in Proc. IEEE Aerospace Conf., Mar. 2021. [Website][Slides]
Guvenc, “AERPAW: Aerial Experimentation and Research Platform on Advanced Wireless”, IEEE Internet of Things Vertical and Topical Summit, Jan. 14, 2021. [Website][Slides]
Guvenc, “AERPAW: Aerial Experimentation and Research Platform on Advanced Wireless”, 2nd Buffalo Day for 5G and Wireless Internet of Things, Nov. 20, 2020. [Website][Youtube][Slides]
A list of AERPAW’s publications and academic outreach can be found on our Wiki.