
The vehicle team has been looking into improvements for our drones. In particular, we are looking at where our drones are too strong, meaning, where we can throw away some material without compromising the integrity of our drone. The figure shows an ANSYS simulation of our drone during a very rough landing. Thanks to Thomas Dolson and Mark for setting up the simulation.

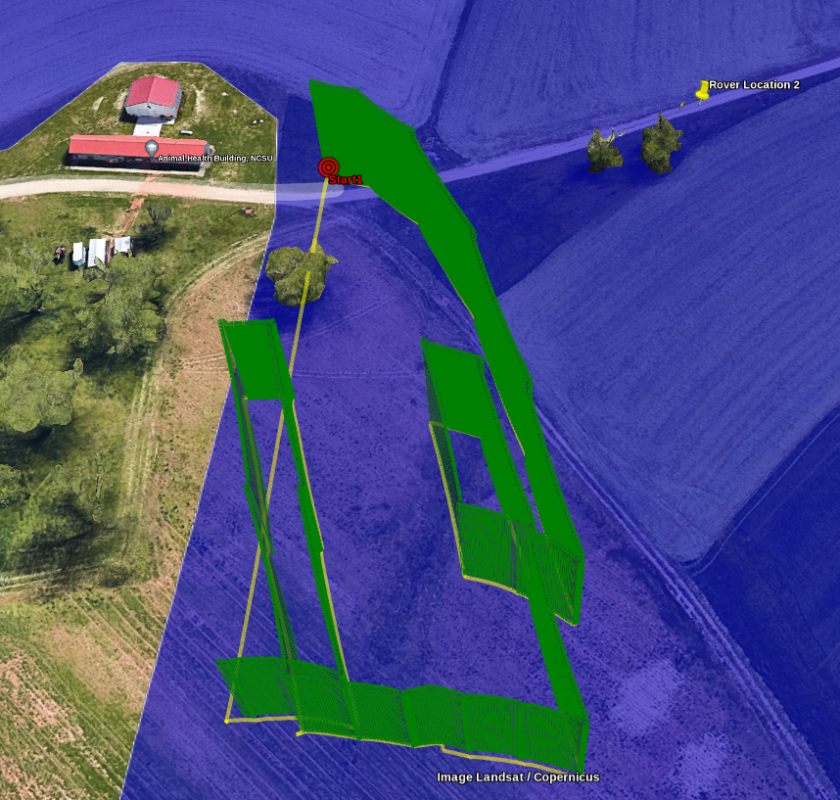
This month we had our first fully autonomous drone flight, where the drone was looking for the rover and at each step simply continued on the same trajectory if the signal strength was improving, or turned right when it didn’t. This is a form of gradient descent. If it does look like it’s not working, that’s exactly right: it resembles more a random walk than a gradient descent. The reason is readily apparent in the second figure that shows that at any given distance there are about two orders of magnitude worth of signal strength values, and hence, there is no way to descend a gradient when there is practically no gradient to descend into. Thank you to Niall for writing the code for the drone, and to Ozgur for writing the radio sounder and processing the data.


Interestingly, visually it is pretty easy to see that the rover is somewhere close to its true position but gradient descent is (clearly) not the way to find it. The figure above shows a scan of the area while the rover is continuously sending radio signals and the drone is scanning the area while recording received signal strength.
Over the New Year’s break, the new (Version 2.0) AERPAW Web Portal went online. It looks more or less the same as the last version, but adds a lot of functionality under the covers. It is more closely integrated with the (also new-and-improved) AERPAW Platform Control, so that existing AERPAW Users will notice that the time to instantiate a new Development session for an AERPAW Experiment – which used to be typically a few days – has dramatically reduced, to fifteen or twenty minutes. For the first Development session of a brand new Experiment, the latency is actually even smaller – of the order of two to four minutes.
The new Portal also has an improved interface for the selection of the Testbed Resources to add to a particular Experiment, eliminating the need to cut-and-paste JSON code, and instead make a choice from an intuitive list. Managing your credentials, Projects, Experiments, and members in your Projects are also more intuitive and powerful in the new Portal.