
AERPAW Autonomous Data Mule (AADM) Challenge

Summary
The AERPAW platform is hosting its second autonomous unmanned aerial vehicle (UAV) student competition called the AERPAW Autonomous Data Mule (AADM) challenge.
- The goal is to download data from four AERPAW base stations (BSs) as quickly as possible with a UAV
- The amount of data to be downloaded from each BS will be revealed at the beginning of each mission
- The UAV will receive the link quality of each BS every second
- UAV can decide which BS to download the data and its flight waypoints every second, based on the link quality and the remaining data at each BS
Participant Teams
As of March 24, 2025, the list of teams that registered to participate in the AADM competition is provided below. AADM competition will continue accepting new teams until notified otherwise on this webpage (registration form). An informational webinar and Q&A session about the AADM Student Challenge was held on February 27. Registered teams are shared with the recording and slides from the webinar. If you recently registered and do not have access to the webinar recording, please contact aerpaw-contact@ncsu.edu. The registration for the competition will be closed on March 31, 2025, and no new registrations will be accepted after that date.
- FlyFetchers (National U. Sciences & Technol. (NUST))
- IMPRESS@UGA (University of Georgia)
- UAEng (University of Miami)
- NICE Lab (NC State University)
- Neural Flyers (NC State University)
- LOBO-PAW (University of New Mexico)
- CAAI (Florida Atlantic University)
- AERO-KNIGHT (University of Central Florida)
- Eagles (University of North Texas)
- Credente (Florida International University)
- SkySync (Clemson University)
- WINGS Lab (University at Buffalo)
- Wisconsinite (Virginia Commonwealth University)
- WiMNet (Columbia University)
- LINC-GW (The George Washington University)
- GSU Panthers (Georgia State University)
- Eagles and Tigers (University of Missouri – Columbia)
- ScrappyPounce (Kennesaw State University)
- Team Dhaksha Anna University (Madras Institute of Technology)
- InFlux (University of Utah)
- SMU ADT Lab (Southern Methodist University)
- UBC UAV team (University of British Columbia)
AADM Development and Tentative Timeline
| Stage-1 (AERPAW Digital Twin) Submissions | Stage-2 (AERPAW Testbed) Finalist Teams | AADM Challenge Winners!! |
| 1. Neural Flyers, North Carolina State University 2. InFlux, University of Utah 3. NICE Lab, North Carolina State University 4. Credente, Florida International University 5. WiMNet, Columbia University 6. IMPRESS@UGA, University of Georgia 7. CAAI, Florida Atlantic University 8. SMU ADT Lab, Southern Methodist University 9. FlyFetchers, National U. Sciences & Technol. (NUST) 10. WINGS Lab, University at Buffalo 11. Eagles, University of North Texas 12. GSU Panthers, Georgia State University 13. AERO-KNIGHT, University of Central Florida 14. ScrappyPounce, Kennesaw State University 15. Tigers, University of Missouri – Columbia 16. LOBO-PAW, University of New Mexico | 1. InFlux, University of Utah 2. Neural Flyers, North Carolina State University 3. IMPRESS@UGA, University of Georgia 4. WiMNet, Columbia University 5. NICE Lab, North Carolina State University 6. Credente, Florida International University 7. WINGS Lab, University at Buffalo 8. CAAI, Florida Atlantic University 9. FlyFetchers, National U. Sciences & Technol. (NUST) 10. SMU ADT Lab, Southern Methodist University 11. Eagles, University of North Texas | 1. InFlux, University of Utah 2. Neural Flyers, North Carolina State University 3. (Tie) WiMNet, Columbia University 3. (Tie) IMPRESS@UGA, University of Georgia |
AADM Development and Tentative Timeline
You will use AERPAW’s digital twin to develop and test your solution as illustrated in the workflow below. You can expect to have access to the software sample experiment in February. You will then be able to develop your solution remotely until June 15, 2025, at your own time, using AERPAW’s digital twin. The final evaluation will be done in the outdoor testbed. Your final score will be a weighted combination of your digital twin (20%) and testbed scores (80%). Each team will have three different tests over which the final score will be averaged. The timeline of the competition is also provided below.


Sample Execution
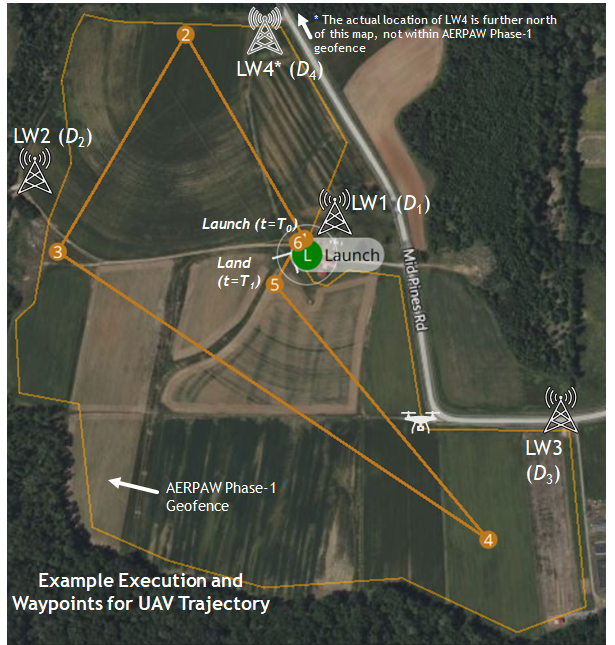
A sample execution of an AADM experiment in the digital twin is provided below. In this example, the UAV is tasked to download the data of sizes D1, D2, D3, and D4, from LW1, LW2, LW3, and LW4, respectively. Once all Di are revealed to the UAV, the UAV generates its mission plan with waypoints 1, 2, 3, 4, 5, and 6. In practice, you can change these waypoints during the UAV’s flight (as well as the UAV’s orientation) based on the remaining data and the signal-to-noise ratio (SNR) information with each BS. In the example below, the UAV flies to all the locations, downloads the data by adjusting the selection of the BS, and lands back at waypoint 6.
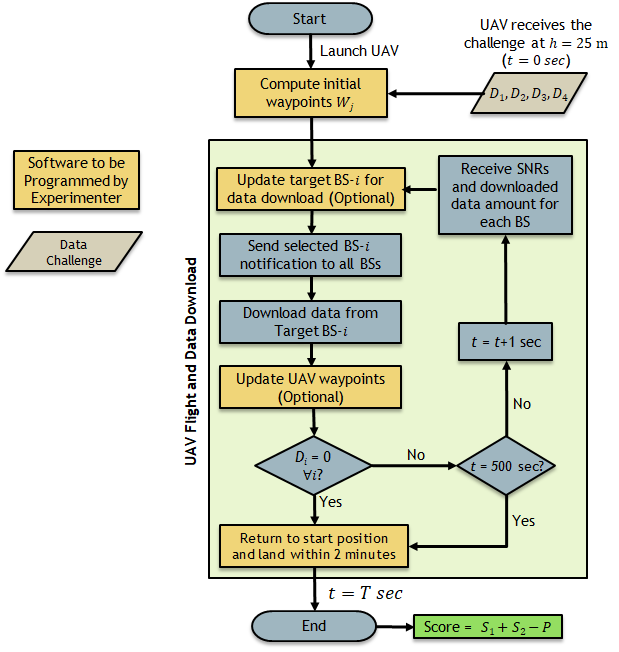
Detailed Experiment Execution Workflow: Details of a sample AADM experiment workflow are provided below. The UAV will learn the amount of data to download from each BS after it comes to an altitude of 25 meters. Based on this data information, the UAV should calculate (and update during the flight as needed) the waypoints for downloading all the data as quickly as possible and then land back where it originally launched. The software blocks that you are allowed to program are shown in red color below. These red blocks in the sample experiment come with initial pre-determined waypoints and will need to be updated by the competition team. Further instructions on how to run the sample experiment can be found here.
Scoring and Ranking
- Your experiment score will be averaged over the three different sets of inputs, first in the digital twin, and then in the testbed.
- The timer will start once the UAV flies up to 25 meters and receives the challenge. After 500 seconds, the UAV will no longer be allowed to download any data.
- The final ranking will be based on the average scores in both testbed and digital twin environments, with the testbed contributing 80% and the digital twin contributing 20%.
- Your experiment score for a given flight will be given by S1 + S2 – P
- S1 = (500 – T) * I(Download_Complete). I(.) is an indicator function for download is complete. If all the data is downloaded, your total S1 score is (500 seconds – T), where T (in seconds) is the time instant the download is complete.
- S2 = 100 x Ddown/Dtotal. You have a fixed score based on the ratio of what you downloaded and the total data to be downloaded, multiplied by 100. If you can not download all the data and land the drone within 500 seconds, your S1 score will be zero, and you will only have an S2 score.
- P (Penalty): If the UAV does not land at/around the place initially launched, there will be an additional 20% penalty on your total score.
- Your software developed in the digital twin will be tested with three different sets of data input vectors: [D1, D2, D3, D4].
- Examples of three different data distributions can be as follows. Note that these are just examples — the actual testing inputs will not be revealed to experimenters and your code should be able to adapt to different scenarios.
- Uniform: D1 = D2 = D3 = D4 = D
- Random: D1 = D, D2 = 2D, D3 = 0.2D, D4 = 5D
- Exponential: D1 = D, D2 = 3D, D3 = 9D, D4 = 27D
Team Formation, Registration, Awards, and Sponsors
- Each team should have at least one, but no more than four students. The students in the teams can be undergraduate or graduate students.
- Each team should have a faculty advisor who is expected to initiate a project under AERPAW’s digital twin, which can be accessed from AERPAW’s experiment web portal at aerpaw.org
- Each team should register for the competition using this link, within the time frame described earlier.
- Only the team leader needs to fill out the registration form. The competing teams are recommended to register as soon as possible, and they can start development once the sample code is revealed in early January.
- The registration deadline is expected to close by June 1, 2025, or once a maximum of 20 slots are filled, whichever comes earlier.
- Participation of international teams in the AADM competition is subject to internal NC State approvals. To prioritize the participation of U.S.-based teams, confirmation for international teams will be sent only after March 31, 2025.
- Students and faculty affiliated with the AERPAW project are not allowed to participate in the competition.
- Once the AERPAW team reviews your registration request, you will receive an email that confirms whether you can join the competition.
There will be three awards for the first, second, and third-place teams, sponsored by NI, Keysight Technologies, AUVSI NC, and 6GNC.
- 1st Place Award:
$1500$3000 + A USRP B205mini - 2nd Place Award:
$1000$2000 + A USRP B205mini - 3rd Place Award:
$750$1500

Other Competition Rules and Frequently Asked Questions
- UAV is revealed Di for each BS after it arrives at 25 m after launch.
- AERPAW team will limit the number of participating teams to 20 and the number of teams that move to the testbed evaluation stage to 10. The teams not ranked in the top 10 slots after the digital twin evaluation will be eliminated.
- UAV is not allowed to move outside of AERPAW’s Phase-1 geofence – any command to fly outside the geofence will result in the UAV returning to base without any further action, with the final score calculated based on the latest downloaded data.
- The maximum UAV speed allowed for the UAV is 10 m/s.
- The lowest and highest altitudes that you can fly the UAV are 22 meters and 70 meters, respectively, and the UAV can fly in any 3D trajectory as long as it satisfies the conditions above.
- Experimenters are not allowed to change the BS code in digital twin – if they change the code, it will not be moved to the testbed. Experimenters can only change the code at the UAV.
- Experimenters are also allowed to change the orientation of the UAV which can affect signal strength due to non-uniform antenna patterns, especially due to the roll and pitch of the drone as it flies at different speeds and the blockage by the drone’s body.
- Note that you may be able to download data more quickly when you are closer to a BS (subject to antenna effects and fading), but then it will take time to travel to that BS, hence your developed software should strike the right balance.
- The propagation in AERPAW’s digital twin includes only the LOS path and ground reflection which is different than the real-world propagation in the Lake Wheeler field.
- The competitors will be provided example propagation data from different locations in the Lake Wheeler field – they will need to decide whether and how to use such data to improve performance
- The channel-sounding GNU radio sample experiment will be used for the experiment – instead of downloading real data, the amount of data downloaded will be approximated by a look-up table based on the SNR reported in the past second. The data you download each second will be provided to you by the BSs every second.
- The AERPAW team will also be logging all the data collected during field experiments, including the signal strength, UAV trajectories, and TDOA localization data from Keysight RF sensors, and make them publicly available for future use after the competition ends.
- These rules may be modified at the discretion of the AERPAW team; if there are any modifications in the rules, the information will be updated on the competition page under aerpaw.org.