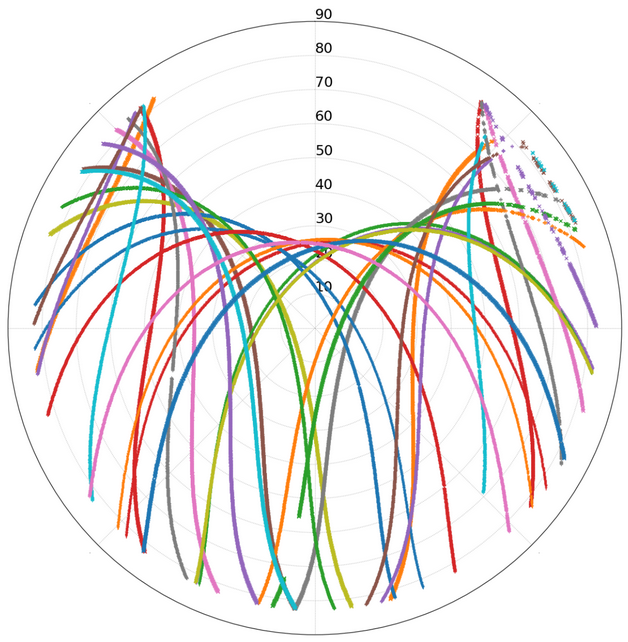
This past month we spent quite a bit of time setting up a GNSS RTK system with an RTK base station installed at LW1, and RTK rovers at the portable nodes. The other fixed nodes will also get a GNSS system (LW2 already got it, the other three are in the queue). The main benefit of installing a survey grade L1/L2 antenna is having a great view of the sky – see results to the left for 24 hours reading – a lot of satellites (80 at times! are visible a lot of the time, resulting in a great precision of the results.


There are two main benefits for installing the RTK system:
The first is it helps with positioning of our mobile nodes. As seen in the snapshot above for LW1, the RTK base station (which provides corrections for the rovers), was localized (using precise point positioning) with 3mm x 2mm x 10mm precision (latitude x longitude x altitude). The corresponding mobile nodes (RTK rovers – our drones and rovers) will benefit from the corrections, thus achieving similar absolute precision. Of course, not all experiments need millimeter levels of precision, but for the ones that do, we now have it.
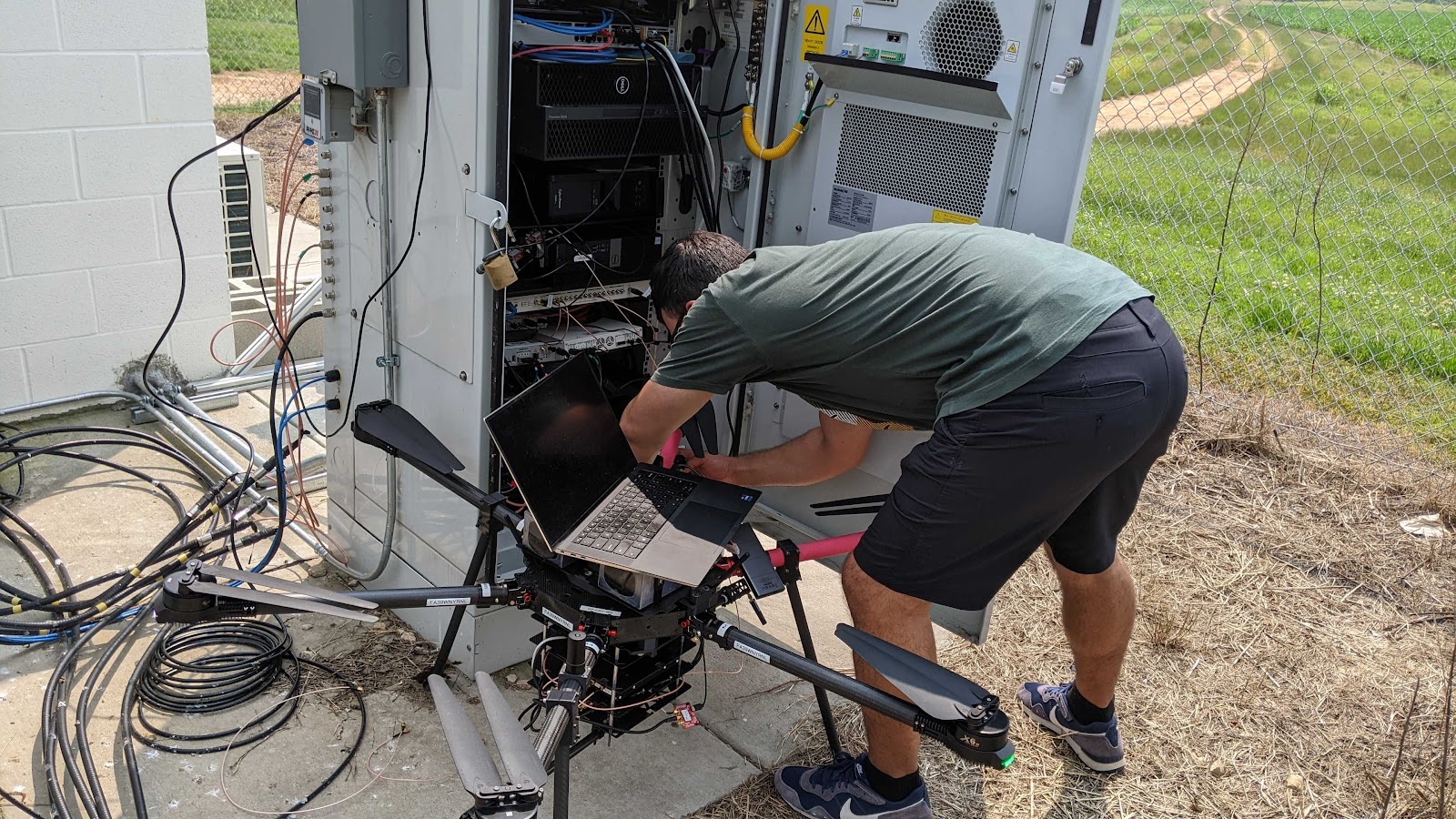
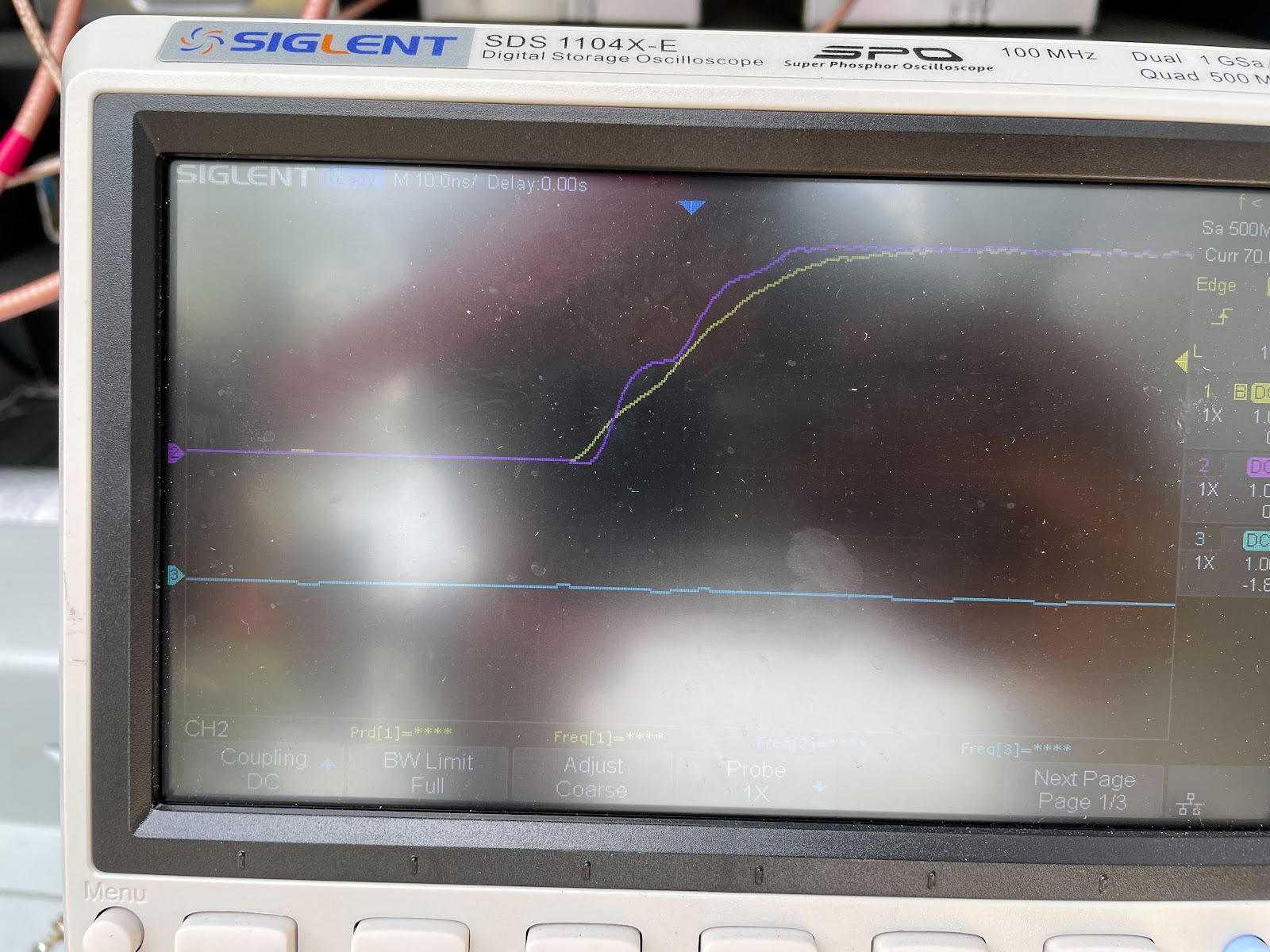
The second benefit of having the RTK system in production is that it enables extremely accurate time synchronization: we use time-corrected GNSS receivers that allow both the computers in the testbed to be tightly synchronized, as well as the software defined radios (USRPs) to be synchronized to a few nano-seconds. In the figures below you can see Anil testing the time synchronization between the GPS at the fixed node (in the enclosure) and the GPS at the portable node (on the drone) – both are connected to an oscilloscope – the horizontal resolution is 10ns per division.
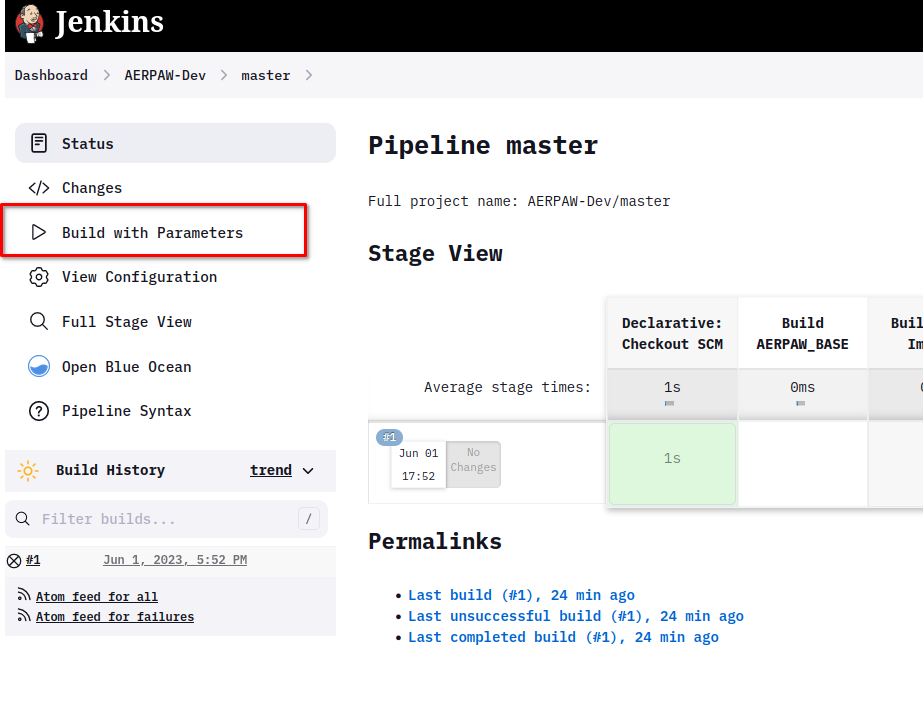
In a similar effort toward consolidating our development operations, Anil Gurses has developed a Jenkins pipeline that automates and streamlines the build of our containers. What used to take days now takes minutes (about 12 minutes). This will enable a faster update of the system from development to production.
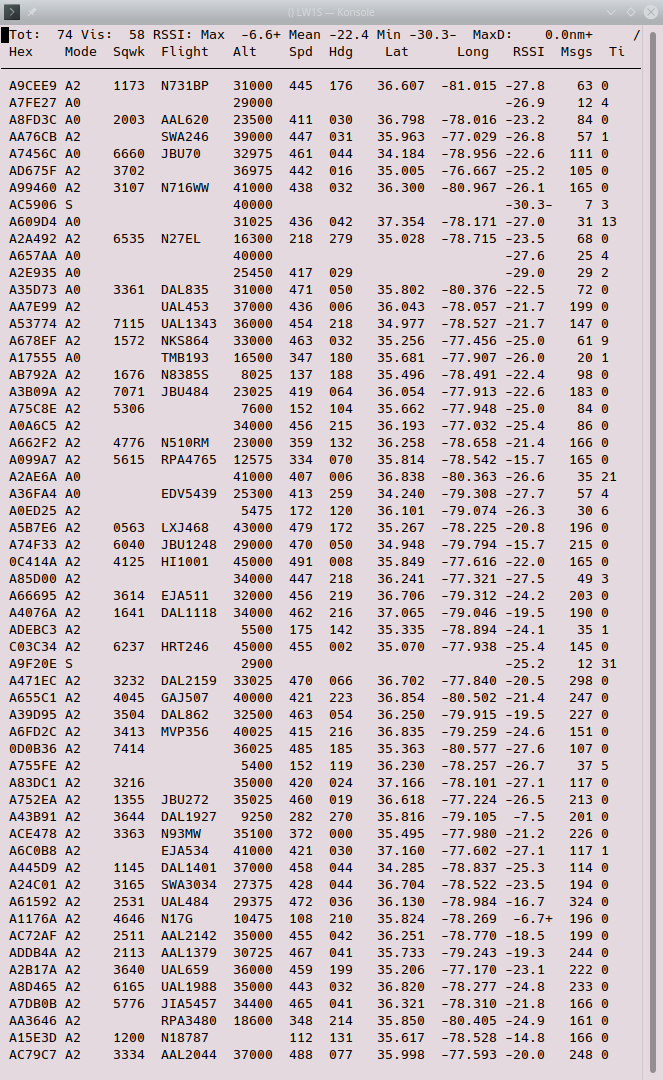
Finally, last but not least, we installed two ADS-B antennas that allow our service computer to monitor all aircrafts passing close (well, up to 200km) to our flying field. This will allow us to first raise an alarm to the testbed operator and safety pilots if any manned aircraft would pass dangerously low to the field during an experiment. Second, long term monitoring of the skies next to the testbed, will give us an idea of how many potentially dangerous aircrafts are close to the AERPAW testbed, and may assist us in our FAA waiver processes. The software for filtering and storing the aircrafts in a database is still under development: to the right you can see a snapshot of a live dump of the airplanes currently captured by the system.