AERPAW team submitted multiple papers over the past two months related to ongoing experiments on the platform and development activities. The list of recent papers along with a link to publicly accessible documents, references to related data repositories (when applicable), and a summary of the related work AERPAW are as follows.
- A. H. F. Raouf, S. J. Maeng, I. Guvenc, O. Ozdemir, and M. L. Sichitiu, “Spectrum Monitoring and Analysis in Urban and Rural Environments at Different Altitudes”, submitted to IEEE Veh. Technol. Conf. (VTC), Florence, Italy, June 2023. [arxiv][data-rep1][data-rep2]
- S. J. Maeng, O. Ozdemir, H. Nandakumar, I Guvenc, M. Sichitiu, R. Dutta, and M. J. Mushi, “Spectrum Activity Monitoring and Analysis for Sub-6 GHz Bands Using a Helikite”, in Proc. IEEE Testbeds for Advanced Systems Implementation and Research (TASIR) Workshop, Bengaluru, India, Jan. 2023.
Spectrum Monitoring and Analysis: In the above two papers, we provide extensive results and detailed analysis of our spectrum occupancy measurements at a helikite that flies up to an altitude of 180 meters in rural and urban settings. While various other bands can be studied similarly using our existing measurements, we focus our analysis on popular LTE and 5G bands in the US (including the C-Band) as well as different 50-MHz segments of the CBRS band, and we investigate how the spectrum occupancy changes in each band for downlink and uplink as a function of altitude. Results provide interesting insights on spectrum activity by different cellular providers. Our data repository includes spectrum measurements between 100 MHz to 6 GHz and is publicly accessible from the links above.




- M. J. Mushi, Y. Liu, S. Sreenivasa, O. Ozdemir, I. Guvenc, M. L. Sichitiu, R. Dutta, and R. Gyurek, “Open RAN Testbeds with Controlled Air Mobility”, submitted to IEEE J. Select. Areas Commun., Jan. 2023.
Open RAN with Controlled Air Mobility: In this work, we provide a comprehensive overview of AERPAW’s programmable RF equipment and programmable vehicles, along with related capabilities for O-RAN experimentation. We show representative results from AERPAW on RAN slicing with a RIC, vehicle control experiments, and programmable radio experiments. An illustration from the submitted manuscript that shows various ways a UAV can be involved in O-RAN is illustrated below. (a) UAVs as UEs; (b) UAVs as O-RUs; (c) UAVs as O-DUs and O-CUs; (d) UAV swarms in O-RAN; (e) Flying wireless backhaul in O-RAN; (f) D2D communications underlaying UAV-assisted O-RAN.

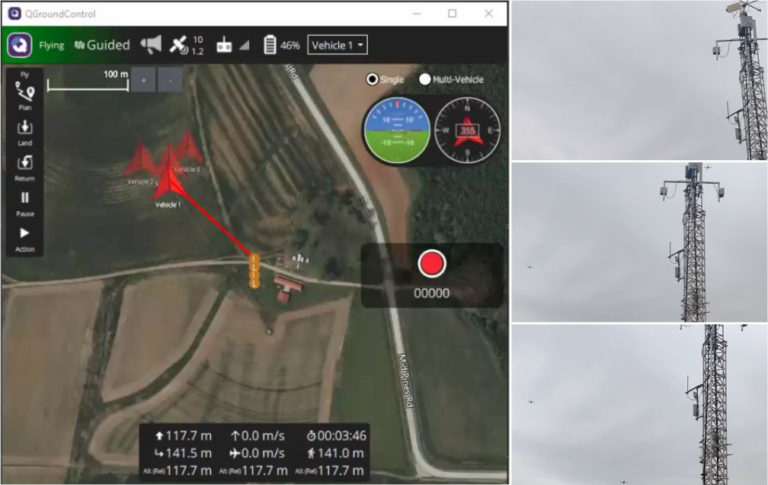
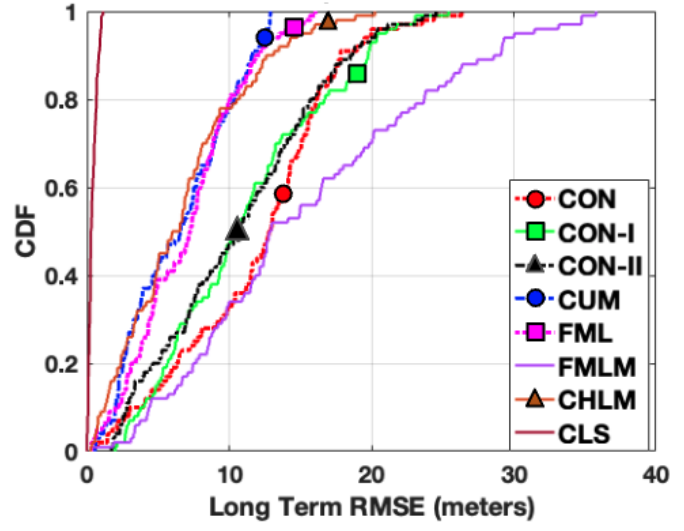
- H. Kwon and I. Guvenc, “RF Signal Source Search and Localization Using an Autonomous UAV with Predefined Waypoints”, submitted to IEEE Veh. Technol. Conf. (VTC), Florence, Italy, June 2023.
RF Source Localization Using Autonomous UAVs: AERPAW team has been working on developing a drone competition for autonomous search and localization of a ground RF source using AERPAW’s emulation and testbed environments. Some preliminary Matlab simulations have been carried out in this study to present high-level concepts. The competition will require development and testing with various AI techniques for accurately AND quickly localizing the ground target. More information about AERPAW’s drone competition including a call for participation to the competition will be released later during Spring 2023, stay tuned!

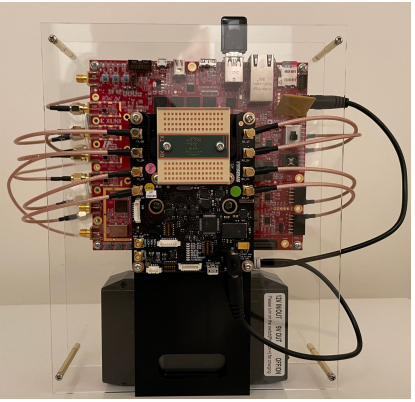
- A. Sahin, M. L. Sichitiu, and I. Guvenc, “A Millimeter-Wave Software-Defined Radio for Wireless Experimentation”, submitted to IEEE Int. Workshop on Computer and Networking Experimental Research using Testbeds (CNERT), Jan. 2023. [Github][Dataset][PYNQ]

mmWave Development with Sivers Phased Arrays: AERPAW mmWave development efforts led by the University of South Carolina had significant progress over the past months. The overall architecture for the developed 60 GHz mmWave platform is highlighted above. A prototype of the mmWave platform and some representative beam scanning results from an indoor environment are provided below. The AERPAW team will be working on replicating a similar setup at 28 GHz and integrating it into experimentation with drones throughout 2023. We expect to open this platform for general availability by the end of AERPAW’s Phase-3.


- M. Mushi, H. Joshi, R. Dutta, I. Guvenc, M. L. Sichitiu, and T. Zajkowski, “AERPAW Backplane Network: A Flexible and Low-Cost Network for an Unmanned Vehicles Wireless Research Testbed”, submitted to USENIX Annual Technical Conference, Jan. 2023.
AERPAW Backplane Network: AERPAW team submitted a comprehensive overview of the platform’s backplane network capabilities to the USENIX conference. The paper highlights various design decisions and detailed architecture descriptions for AERPAW’s backplane network.

- S. J. Maeng, O. Ozdemir, I. Guvenc, M. L. Sichitiu, M. Mushi, and R. Dutta, “LTE I/Q Data Set for UAV Propagation Modeling, Communication, and Navigation Research”, submitted to IEEE Commun. Mag., Nov. 2022. [arxiv][Dataset][IEEEDataport]
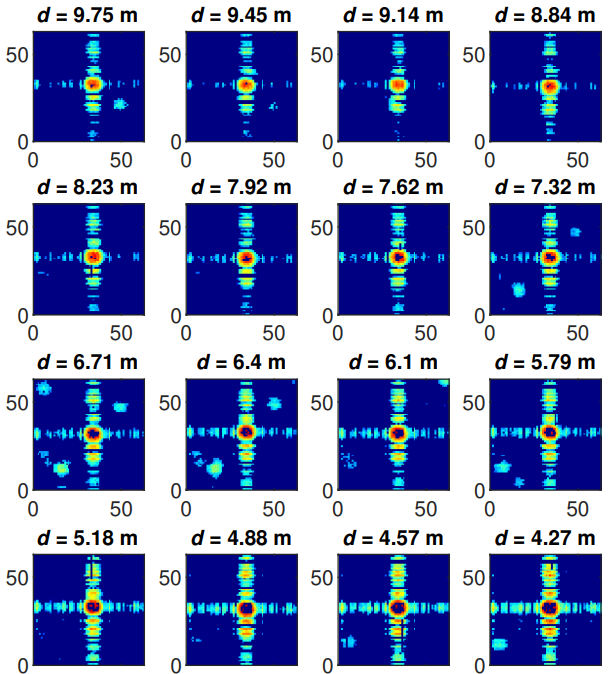
- S. J. Maeng, O. Ozdemir, I. Guvenc, M. Sichitiu, R. Dutta, and M. Mushi, “AERIQ: SDR-Based LTE I/Q Measurement and Analysis Framework for Air-to-Ground Propagation Modeling”, in Proc. IEEE Aerospace Conference, Big Sky, MO, Mar. 2023.
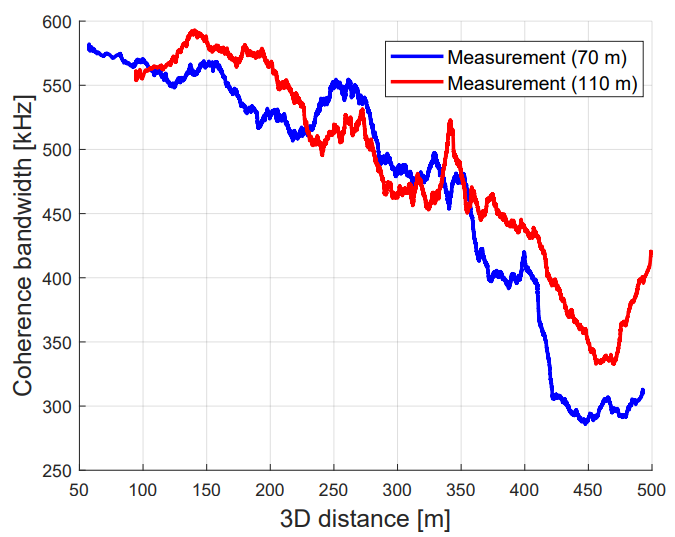
LTE I/Q Measurements and Analysis at Multiple UAV Altitudes: AERPAW team submitted two papers that use LTE I/Q measurements for air-to-ground signal capture and post processing using LTE signals in C-Band. We use srsRAN to transmit 4G LTE signals at 3.51 GHz, and I/Q samples are captured at a UAV at various altitudes. Collected samples are then post-processed using Matlab’s LTE toolbox, for time/frequency synchronization, PCI detection and cell selection, channel estimation over the common reference symbols, coherence bandwidth/time estimation, and 3D kriging interpolation of the reference signal received power. Representative results are provided below. I/Q samples and Matlab scripts to generate the results in the papers are made publicly available in the links above. The example experiment will also be available for external researchers to use by the end of Spring 2023 as part of AERPAW Phase-2 features. AERPAW is planning to release a 5G version of this study during 2023.

Construction Updates: AERPAW team has worked on operationalizing the LW2 fixed node in Lake Wheeler during December. The fixed node was populated with SDR equipment, cables, and antennas, and it is currently under alpha testing by the AERPAW team. Hardware and antennas are currently being installed in the four other Phase-2 fixed nodes, LW3, LW4, LW5, and CC3, and it is expected that they will be available for testing in February.